- 頭條《電工技術(shù)學(xué)報(bào)》優(yōu)秀論文|改進(jìn)型偏差耦合多電機(jī)轉(zhuǎn)速同步控制2021-12-12 作者:耿強(qiáng) 王少煒 等 | 來源:《電工技術(shù)學(xué)報(bào)》 | 點(diǎn)擊率:導(dǎo)語傳統(tǒng)偏差耦合多電機(jī)同步控制系統(tǒng)中,系統(tǒng)的跟蹤性能與同步性能相互耦合,難以兼顧,尤其在多電機(jī)系統(tǒng)起動(dòng)階段,轉(zhuǎn)速同步誤差較大。針對(duì)以上問題,本文運(yùn)用線性系統(tǒng)校正原理設(shè)計(jì)了改進(jìn)型偏差耦合控制結(jié)構(gòu),實(shí)現(xiàn)了系統(tǒng)的同步性能與跟蹤性能的解耦調(diào)節(jié),有效提升了系統(tǒng)起動(dòng)階段的性能。
《電工技術(shù)學(xué)報(bào)》2019年度優(yōu)秀論文獲獎(jiǎng)?wù)撐暮唸?bào)
《光伏發(fā)電出力預(yù)測(cè)技術(shù)研究綜述》等15篇優(yōu)秀論文入選《電工技術(shù)學(xué)報(bào)》2019年度優(yōu)秀論文,榮獲中國電工技術(shù)學(xué)會(huì)表彰。現(xiàn)將部分獲獎(jiǎng)?wù)撐牡奈恼潞唸?bào)分享給各位讀者,以期促進(jìn)本領(lǐng)域的技術(shù)交流。
團(tuán)隊(duì)介紹

天津工業(yè)大學(xué)“高效能電機(jī)系統(tǒng)智能設(shè)計(jì)與制造”國家地方聯(lián)合工程研究中心緊密圍繞國家和天津市在智能制造領(lǐng)域的戰(zhàn)略部署和主攻方向,發(fā)揮在技術(shù)創(chuàng)新層面的主導(dǎo)作用,開展高效能電機(jī)系統(tǒng)智能設(shè)計(jì)與制造領(lǐng)域的前瞻性研究。中心設(shè)立了高效能電機(jī)系統(tǒng)智能設(shè)計(jì)與結(jié)構(gòu)優(yōu)化、高效能電機(jī)系統(tǒng)電力電子變流與驅(qū)動(dòng)、高效能電機(jī)系統(tǒng)實(shí)時(shí)檢測(cè)與智能控制、高效能電機(jī)系統(tǒng)智能制造與產(chǎn)業(yè)化應(yīng)用等主要發(fā)展方向,通過開展產(chǎn)學(xué)研合作交流,提升高效能電機(jī)系統(tǒng)領(lǐng)域先進(jìn)材料、工藝及配套技術(shù)的工程化與產(chǎn)業(yè)化,力求解決國內(nèi)高效能電機(jī)系統(tǒng)設(shè)計(jì)、控制及制造面臨的瓶頸問題。

耿強(qiáng)
1978出生,教授,博士生導(dǎo)師,入選天津市“131創(chuàng)新型人才培養(yǎng)工程”、天津市高校“中青年骨干創(chuàng)新人才培養(yǎng)計(jì)劃”;擔(dān)任中國電工技術(shù)學(xué)會(huì)電控系統(tǒng)與裝置專委會(huì)委員、中國自動(dòng)化學(xué)會(huì)電氣自動(dòng)化專委會(huì)委員、國家自然科學(xué)基金通訊評(píng)議專家等。主持國家自然科學(xué)基金面上項(xiàng)目、天津市自然科學(xué)基金重點(diǎn)項(xiàng)目、天津市教委科研計(jì)劃重點(diǎn)項(xiàng)目等;作為主要參加人參與國家自然科學(xué)基金重大項(xiàng)目、科技部973計(jì)劃項(xiàng)目、國家自然科學(xué)基金面上項(xiàng)目、中國工程院咨詢研究重大項(xiàng)目等。研究成果發(fā)表SCI/EI收錄論文40余篇;授權(quán)發(fā)明專利20余項(xiàng);獲省部級(jí)科技特等獎(jiǎng)1項(xiàng)、一等獎(jiǎng)3項(xiàng)。
研究背景
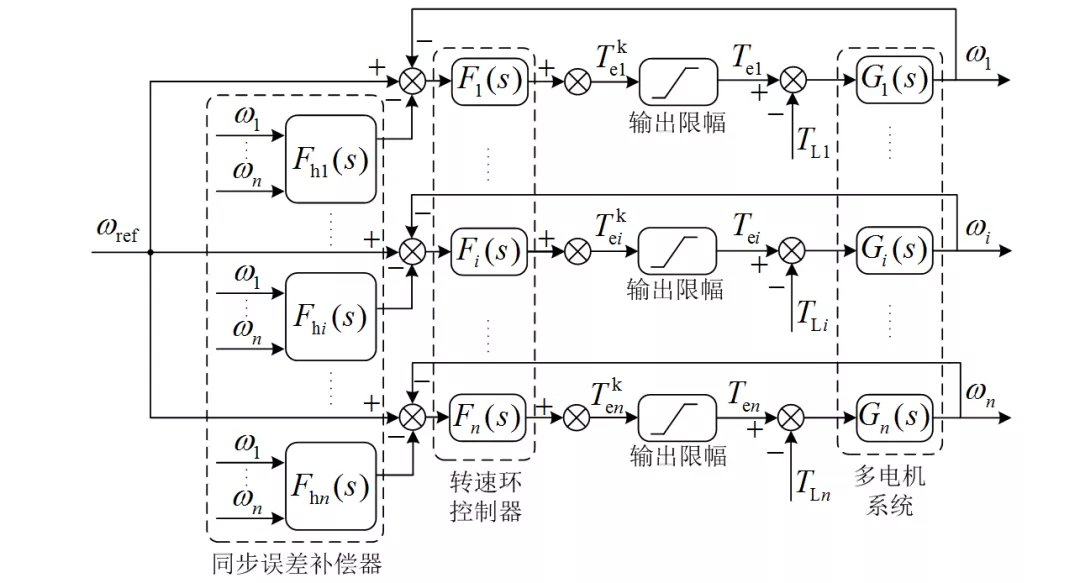
圖1 傳統(tǒng)偏差耦合控制結(jié)構(gòu)示意圖
偏差耦合控制結(jié)構(gòu)因可靠性好、耦合程度高、可控電機(jī)數(shù)量多而被廣泛用于多電機(jī)轉(zhuǎn)速同步控制場(chǎng)合。但傳統(tǒng)結(jié)構(gòu)需要將系統(tǒng)中所有電機(jī)的速度信號(hào)分別輸入到各自電機(jī)前端補(bǔ)償模塊中進(jìn)行相關(guān)運(yùn)算,轉(zhuǎn)速補(bǔ)償機(jī)制較為復(fù)雜;并且由于轉(zhuǎn)速環(huán)控制器參數(shù)的選擇會(huì)同時(shí)影響系統(tǒng)的跟蹤性能與同步性能,所以在保證系統(tǒng)快速性與穩(wěn)定性的前提下難以同時(shí)兼顧系統(tǒng)的同步性能。
論文方法及創(chuàng)新點(diǎn)
本文提出了一種結(jié)構(gòu)較為簡單,同步性能較好的改進(jìn)型偏差耦合控制結(jié)構(gòu),為簡化分析,忽略電流環(huán)延遲和測(cè)速延遲,其結(jié)構(gòu)如圖2所示。
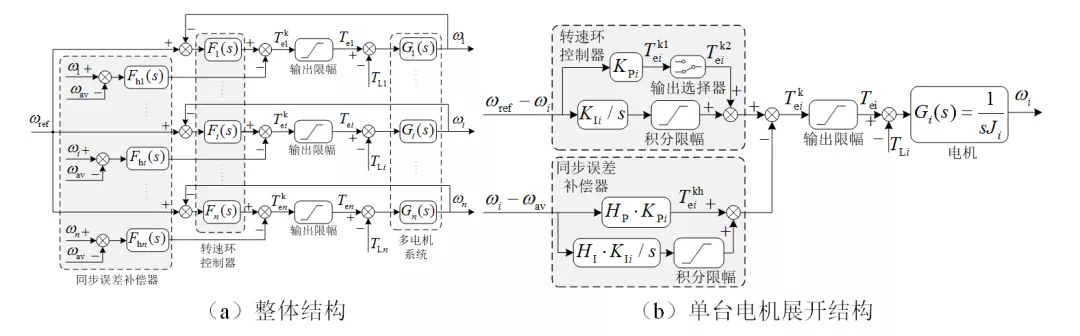
圖2 改進(jìn)型偏差耦合控制結(jié)構(gòu)示意圖
所提改進(jìn)型偏差耦合結(jié)構(gòu)下的多電機(jī)系統(tǒng)主要由三部分構(gòu)成:轉(zhuǎn)速環(huán)控制器、同步誤差補(bǔ)償器以及多電機(jī)系統(tǒng)。對(duì)于多電機(jī)系統(tǒng)而言,為簡化分析,將系統(tǒng)中每臺(tái)電機(jī)的傳遞函數(shù)視為積分環(huán)節(jié),經(jīng)推導(dǎo)可得任意兩臺(tái)電機(jī)之間的同步誤差為
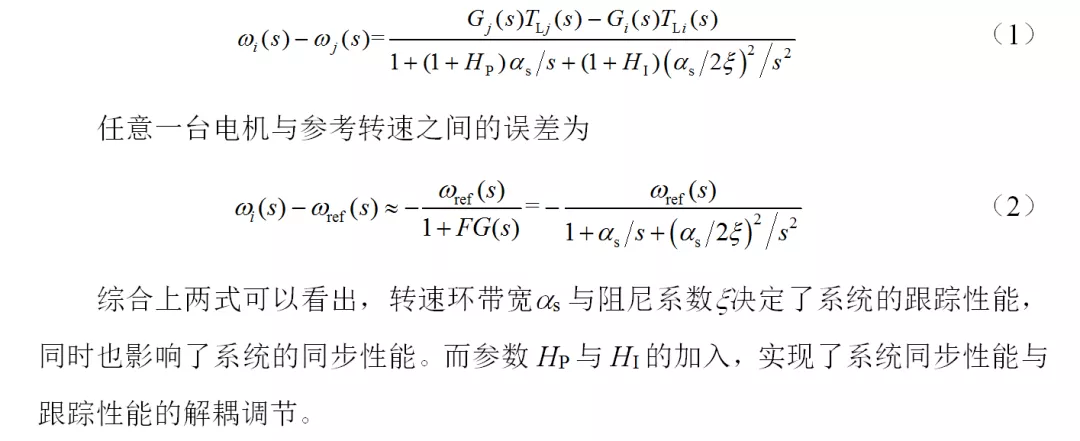
為了得到改進(jìn)型偏差耦合結(jié)構(gòu)在不同HP與HI的參數(shù)取值下,系統(tǒng)同步性能的動(dòng)態(tài)性能,以改進(jìn)型偏差耦合結(jié)構(gòu)為基礎(chǔ),進(jìn)行3臺(tái)永磁同步電機(jī)的仿真,結(jié)果如圖3所示。
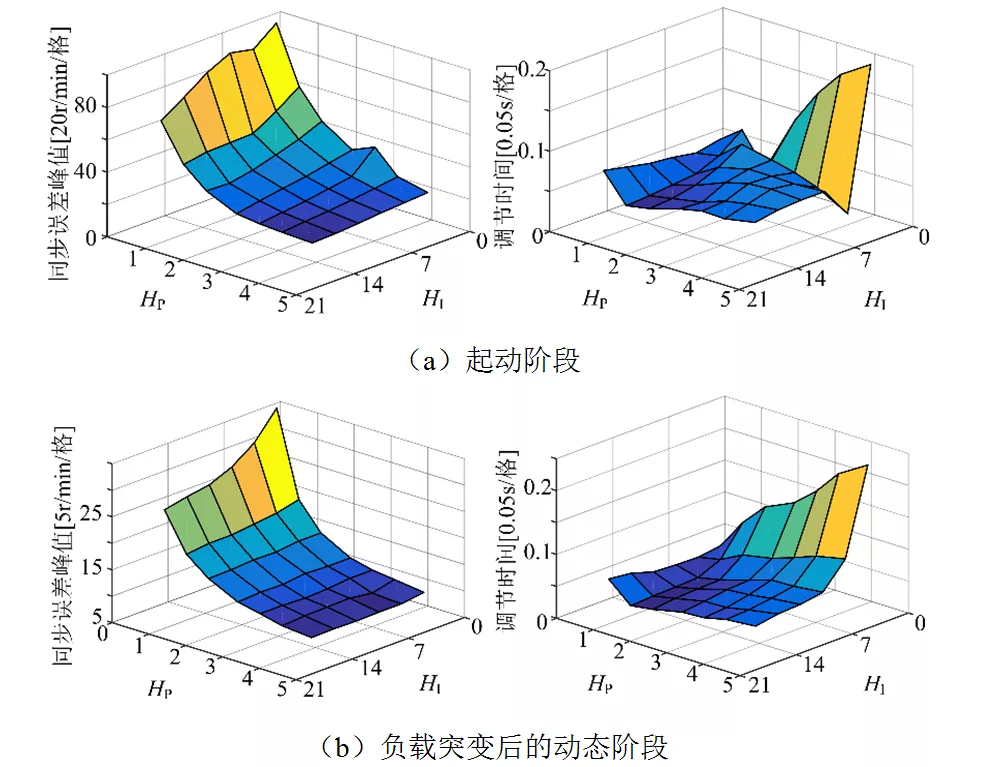
圖3 改進(jìn)偏差耦合結(jié)構(gòu)動(dòng)態(tài)性能仿真
由圖中可以看出,當(dāng)3臺(tái)電機(jī)所帶負(fù)載不同時(shí),無論是起動(dòng)階段還是負(fù)載突變階段,系統(tǒng)同步誤差峰值隨著HP與HI的增大而逐漸減小,但同步誤差調(diào)節(jié)時(shí)間卻隨著HP的增大而增大;在起動(dòng)階段,由于選擇輸出器的作用,調(diào)節(jié)時(shí)間隨HP與HI的變化較為復(fù)雜,當(dāng)HP比HI為某一較小比值時(shí),調(diào)節(jié)時(shí)間較短。
依據(jù)上述理論分析與仿真結(jié)果,對(duì)系統(tǒng)參數(shù)進(jìn)行了整定,并搭建了多電機(jī)實(shí)驗(yàn)平臺(tái)進(jìn)行實(shí)驗(yàn)驗(yàn)證,實(shí)驗(yàn)平臺(tái)和起動(dòng)階段實(shí)驗(yàn)結(jié)果分別如圖4、圖5所示。
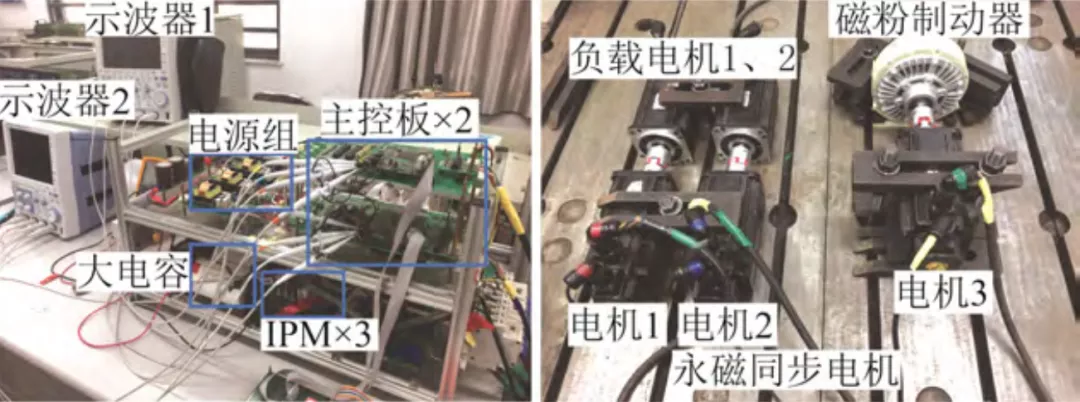
圖4 多電機(jī)實(shí)驗(yàn)平臺(tái)
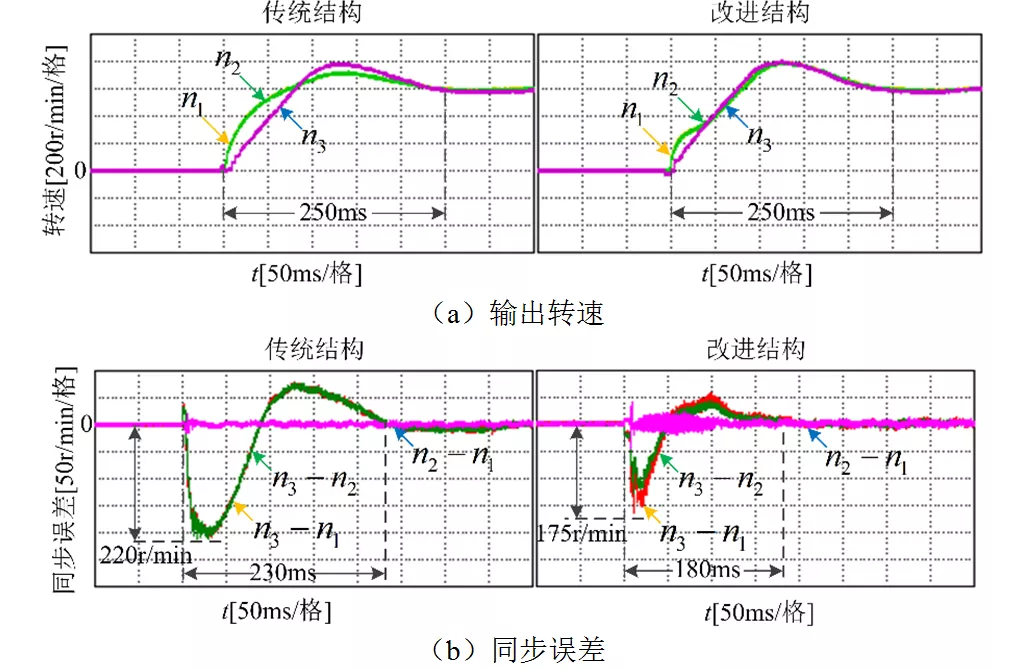
圖5 兩種結(jié)構(gòu)在起動(dòng)過程中的輸出轉(zhuǎn)速與同步誤差
由圖5(a)可以看出,與傳統(tǒng)結(jié)構(gòu)相比,改進(jìn)結(jié)構(gòu)的3臺(tái)電機(jī)的調(diào)節(jié)時(shí)間保持不變;由圖5(b)可以看出,在電機(jī)起動(dòng)瞬間,改進(jìn)結(jié)構(gòu)的同步誤差最大值相較于傳統(tǒng)結(jié)構(gòu),縮小了約20%;并且,同步誤差調(diào)節(jié)時(shí)間相較于傳統(tǒng)結(jié)構(gòu),也減小了約20%。
結(jié)論
本文所設(shè)計(jì)的改進(jìn)型偏差耦合結(jié)構(gòu)適用于3臺(tái)及以上電機(jī)且對(duì)同步性能有較高要求的多電機(jī)協(xié)同控制系統(tǒng),其特點(diǎn)如下:
(1)設(shè)計(jì)了新型多電機(jī)系統(tǒng)偏差耦合控制結(jié)構(gòu),實(shí)現(xiàn)了系統(tǒng)同步性能與跟蹤性能的解耦調(diào)節(jié);
(2)采用比例-積分控制的同步誤差補(bǔ)償器替代了傳統(tǒng)結(jié)構(gòu)中只含比例控制的轉(zhuǎn)速補(bǔ)償環(huán)節(jié),減少了誤差的調(diào)節(jié)時(shí)間,使用自身轉(zhuǎn)速與平均轉(zhuǎn)速作為輸入量,相對(duì)于傳統(tǒng)結(jié)構(gòu)減少了在線計(jì)算量;
(3)在轉(zhuǎn)速環(huán)控制器中增加了選擇輸出器,電機(jī)負(fù)載不均起動(dòng)時(shí),在同步誤差比例補(bǔ)償量與限幅量的參與下,將轉(zhuǎn)速環(huán)比例部分補(bǔ)償量進(jìn)行在線調(diào)節(jié)去飽和(使之小于限幅值),然后經(jīng)同步補(bǔ)償作用,使得平均轉(zhuǎn)速以下的重載電機(jī)參考轉(zhuǎn)矩相對(duì)較大,平均轉(zhuǎn)速以上的輕載電機(jī)參考轉(zhuǎn)矩相對(duì)較小,從而減小了起動(dòng)階段系統(tǒng)的同步誤差。
引用本文
耿強(qiáng), 王少煒, 周湛清, 史婷娜, 夏長亮. 改進(jìn)型偏差耦合多電機(jī)轉(zhuǎn)速同步控制[J]. 電工技術(shù)學(xué)報(bào), 2019, 34(3): 474-482. Geng Qiang, Wang Shaowei, Zhou Zhanqing, Shi Tingna, Xia Changliang. Multi-Motor Speed Synchronous Control Based onImproved Relative Coupling Structure. Transactions of China Electrotechnical Society, 2019, 34(3): 474-482.
備檢修與故障診斷”專題征稿通知.jpg)
運(yùn)行機(jī)制和競(jìng)價(jià)策略專題征稿.jpg)
鍵技術(shù)研究及其應(yīng)用”專題征稿通知.jpg)
電廠關(guān)鍵技術(shù)研究及其應(yīng)用”專題征稿通知.jpg)
開關(guān)設(shè)備關(guān)鍵技術(shù)”專題征稿.jpg)
設(shè)備關(guān)鍵技術(shù)”專題征稿.jpg)
配用電技術(shù)”專題征稿.jpg)
中斷”專題征稿.jpg)
能技術(shù)及應(yīng)用專題征稿.jpg)
.jpg)
右側(cè).png)