- 頭條北京交大學者提出適用于機車PWM整流器的比例積分-諧振電流控制器2022-03-14 作者:游小杰, 楊才偉 等 | 來源:《電工技術學報》 | 點擊率:導語為了保證電力機車PWM整流器對基波電流的快速響應,并實現對直流偏置和諧波電流的快速抑制,本文采用比例積分(PI)和多個矢量比例積分(VPI)控制器進行電流控制。針對傳統控制器參數設計方法中各增益相互耦合的問題,本文提出一種增益解耦設計方法,給出具體設計參數。該設計方法保證了系統的動態性能和魯棒性。
團隊介紹

- 游小杰,1964年出生,北京交通大學電力電子研究所所長、教授。研究方向為電力電子變流技術、電力機車牽引控制技術。組織研發的大功率變流器控制技術已經批量應用于中國中車的HXD2C、HXD2等型號的重載電力機車和復興號高速動車組,裝車數量超過500臺。
- 楊才偉,1992年出生,博士,新風光電子科技股份有限公司技術研究員,研究方向為電力機車牽引變流器控制、電力電子變壓器控制、儲能變流器控制。
- 王劍,1979年出生,北京交通大學電力電子研究所副教授。研究方向為電力電子變流技術、電力機車牽引控制技術。
- 王琛琛,1981年出生,北京交通大學電氣工程學院教授、副院長。研究方向為電力機車牽引傳動和大功率變流器控制技術。
研究背景
隨著寬禁帶器件的發展,碳化硅器件有望應用于機車牽引系統的PWM整流器中,使開關頻率提高,并網濾波器的電感和體積可隨之減小。但由于牽引網電壓存在諧波,造成的電流諧波也相應增大,增加了PWM整流器電流控制的難度。
機車PWM整流器的電流控制對系統的穩定、快速響應起到了至關重要的作用,作為單相系統,使用諧振控制器對基波和各次諧波控制是非常合適的選擇。而目前在電流控制中涉及采用多個諧振控制器的情況時,控制器增益的選取沒有完全解耦,大都需通過觀察頻率響應并根據經驗選取,很難形成一套通用的設計方案。
論文所解決的問題及意義
針對采用多個諧振控制器控制的機車PWM整流器,本文提出了一種新的增益設計方法,基于Nichols圖的分析簡化了分析復雜度,將增益設計轉化成最小幅值裕度和多個相位穿越頻率的設計,實現增益設計的解耦,通過最小化調整時間和超調確定最終的增益參數。該設計方法在優化系統動態響應的同時,保證了系統較強的魯棒性。
論文方法及創新點
在設計控制器時,根據控制目標選定使用PI控制器加多個VPI控制器后,還需考慮計算延時和PWM延時的影響,通過對比敏感峰值倒數確定VPI控制器中是否加入相位補償,確定最終的控制器形式。
確定控制器后還需對控制器增益進行設計。與Bode圖相比,在圖1所示的Nichols圖中,幅值裕度和相位裕度與系統穩定性的關系更容易觀察。因此提取系統整體增益,并給出增益與最小幅值裕度的關系式。由于系統增益不影響相位穿越頻率,因此進一步將諧振控制器增益設計轉換成相位穿越頻率的設計,實現增益設計的解耦。最終通過優化調整時間和超調得到最終的控制器增益。
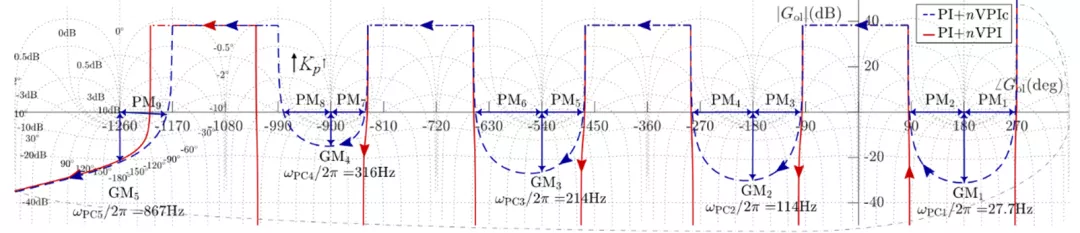
圖1 使用不同相位補償角系統開環頻率響應Nichols圖對比
結論
為了使開關頻率提高后電力機車PWM整流器的電流控制器能夠對基波電流快速響應,抑制電流中的偏置和諧波,本文采用了PI加多個VPI控制器,提出了該控制器的一種增益設計方法。本文推薦在控制頻率和被控信號頻率比值小于16時在VPI控制器中加入相位補償。在此基礎上,根據調整時間和超調進行參數設計,給出了具體的相位穿越頻率設計結果,并推薦將系統的最小幅值裕度設計為15dB。最后根據文章中給出的公式計算具體增益參數。
引用本文
游小杰, 楊才偉, 王劍, 王琛琛, 原志強. 一種適用于機車PWM整流器的比例積分-諧振電流控制器設計[J]. 電工技術學報, 2021, 36(23): 4926-4936. You Xiaojie, Yang Caiwei, Wang Jian, Wang Chenchen, Yuan Zhiqiang. A Tuning Method for Proportional Integral-Resonant Current Controller in Locomotive PWM Rectifiers. Transactions of China Electrotechnical Society, 2021, 36(23): 4926-4936.



電廠關鍵技術研究及其應用”專題征稿通知.jpg)